Mariusz Specht
Mariusz Specht
TUTORIAL
Bathymetric monitoring system for shallow waterbodies using autonomous unmanned flying and floating measurement platforms (INNOBAT)
Mariusz Specht
Gdynia Maritime University, Poland
ABSTRACT
As part of the INNOBAT research project, conducted in 2021-2024, a bathymetric monitoring system for shallow waterbodies using autonomous unmanned flying and floating measurement platforms was developed.
The INNOBAT system enables the study of the coastal topography in accordance with the requirements provided for the second most stringent International Hydrographic Organization (IHO) order – Special (horizontal position error ≤ 2 m (p=0.95), vertical position error ≤ 0.25 m (p=0.95)). The bathymetric and topographic system enables accurate and precise measurement of the entire coastal relief based on data acquired by a camera, a Light Detection And Ranging (LiDAR) and a Global Navigation Satellite System (GNSS)/Inertial Navigation System (INS) mounted on an Unmanned Aerial Vehicle (UAV), as well as by a MultiBeam EchoSounder (MBES) and a GNSS Real Time Kinematic (RTK) receiver placed on an Unmanned Surface Vehicle (USV).
LiDAR data enable the development of a numerical model of the land area. Aerial photos taken by the camera allow for determining coastline course and estimating depths in the area between the shoreline and the minimum isobath recorded by the echo sounder mounted on the USV. The remaining part of the seabed is measured by the integrated hydrographic system (MBES and GNSS RTK receiver) placed on the USV.
The geospatial data obtained in this way are then subjected to multi-sensor fusion (integration) to the target 3D coordinate system (PL-UTM/PL-EVRF2007-NH). For this purpose, the INNOBAT system computer application is used, consisting of four plugins for QGIS software:
- Grid creator – the task of this module is to integrate hydroacoustic and optoelectronic data and to use algorithms designed to model the coastal zone topography.
- Depth prediction – the task of this module is to determine the depth of a shallow waterbody based on the Structure from Motion (SfM) point cloud using the Support Vector Regression (SVR) algorithm.
- Shoreline extraction – the task of this module is to extract the coastline from LiDAR data using the algorithms proposed by Xu S. et al. and the contour method.
After harmonisation of geospatial data, a final numerical model of the coastal zone is developed in the form of a topo-bathymetric chart. Based on the model generated in this way and the information obtained, it is possible to assess the navigational and hydrographic situation of the shallow waterbody, including the coastline course, three-dimensional position coordinates, the waterbody area, etc.
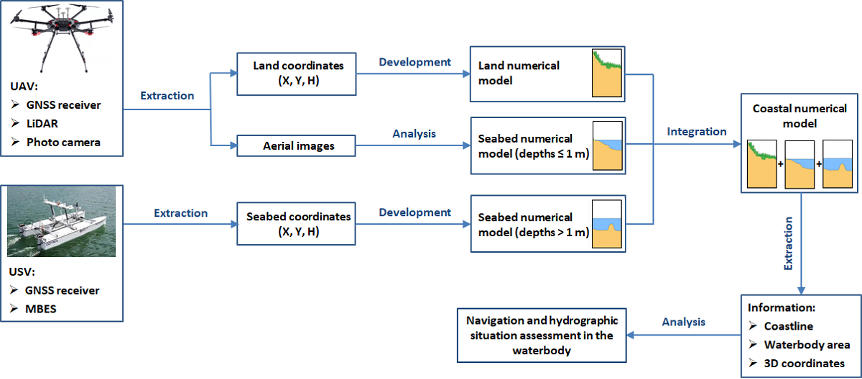
A diagram of the operation and functioning of an innovative autonomous unmanned system for bathymetric monitoring of shallow waterbodies (INNOBAT system).
SPEAKER BIOGRAPHY
Mariusz Specht received a PhD degree in civil engineering and transport from the Polish Naval Academy, Poland, in 2019. His doctoral dissertation, entitled: Determining the territorial sea baseline using a USV in selected waterbodies of the Republic of Poland, focused on developing methods for determining the territorial sea baseline, which is the maritime boundary of a coastal state, using a USV. Now, he works at Gdynia Maritime University as an assistant professor in the Department of Transport.
Mariusz Specht is the author or co-author of 108 peer-reviewed scientific publications, including 71 articles in JCR journals. He managed 3 research projects financed from external sources: National Centre for Research and Development, Ministry of Science and Higher Education and National Science Centre, as well as 2 research projects financed as part of the statutory activities of Gdynia Maritime University. Additionally, he has presented 28 papers at scientific conferences and co-organised 6 scientific conferences. Moreover, he was a reviewer of 126 publications in 36 scientific journals. He has also reviewed 2 PhD theses and acted as an assistant supervisor in a successfully defended doctoral dissertation. His publications, research projects and conference presentations focus on hydrography, satellite geodesy and satellite navigation.